Контроллер электровелосипеда: что это, принцип работы, виды, выбор, популярные модели, подключение
Содержание:
- Конструкция прибора
- Классификация ПЛК
- История создания
- Что такое микроконтроллер
- Что означает ошибка PCI Simple Communications Controller. Откуда скачать драйвер
- Что такое контроллер?
- Языки программирования PLC: LD, FBD, SFC, ST, IL, CFC
- Сердцем любой автоматической системы управления (АСУ) служит промышленный контроллер.
- Принцип работы
- Что нужно для программирования микроконтроллера
- Подбор контроллера заряда по необходимым функциям
- Основные типы
- Процессоры
- Виды контроллеров
- В чем отличие микроконтроллера от микропроцессора?
- Порт UART в полетном контроллере
- Конструкция и принцип действия
- Принцип работы ПЛК
- Заключение. Как работает SSD – контроллер наше все, ну почти…
- Заключение
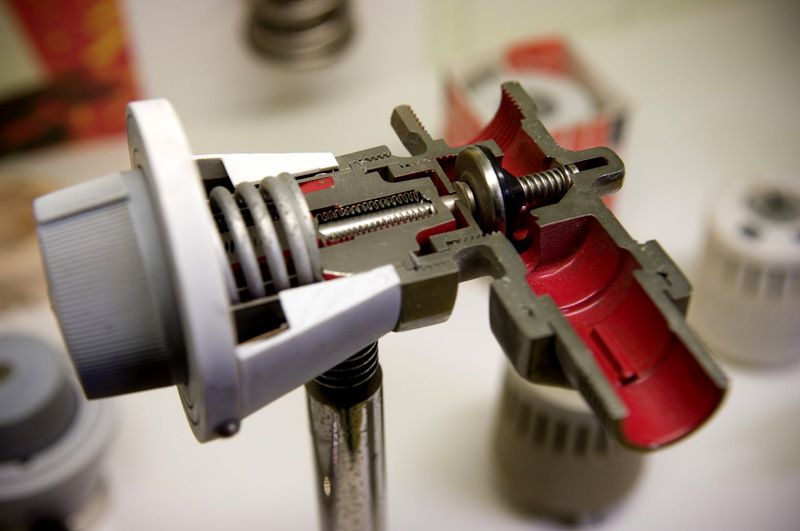
Конструкция прибора
При конструировании контроллера машиниста следует придерживаться нескольких требований. Во-первых, он должен быть сделан таким образом, чтобы обеспечить максимальную простоту и легкость использования. Во-вторых, должна быть обеспечена максимально простая кинематическая составляющая для блокировочных механизмов. В-третьих, габариты и масса всего механизма должны быть максимально минимизированы. Среди других важных требований к конструкции стоит выделить необходимость обеспечения высокой надежности работы всех его переключающих механизмов, удобства при осмотре и во время ремонта контроллера машиниста.
Кроме этого все рукоятки должны быть размещены на пульте так, чтобы обеспечить не только простоту и удобство их использования, а еще и таким образом, чтобы во время управления локомотивом машинист не отвлекался от наблюдения за сигналами, путями, сетью. Контроллер машиниста обладает блокировочными механизмами со взаимосвязью. Это исключается ошибочное перемещение двух противоположных по функциям рукоятей машинистом.
Классификация ПЛК
Существует большое количество параметров, по которым классифицируют ПЛК.
- моноблочные;
- модульные;
- распределенные;
- универсальные.
- нано-ПЛК, с числом каналов менее 16;
- микро-ПЛК (16…100 каналов);
- средние (100…500 каналов);
- большие, с числом каналов более 500.
ПЛК могут программироваться с:
- лицевой панели устройства;
- помощью переносного программатора;
- использованием компьютера.
- стоечный;
- настенный;
- панельный (устанавливаются на дверку шкафа или специальную панель);
- на DIN-рейке (установка внутри шкафа).
Пишите комментарии,дополнения к статье, может я что-то пропустил. Загляните на карту сайта, буду рад если вы найдете на моем сайте еще что-нибудь полезное.
История создания
В 60 годах 20 века для управления телефонными станциями, промышленным оборудованием использовались сложные схемы с реле. Они не отличались повышенной надежностью или ремонтопригодностью. Инженерам одной из компаний, американской General Motors, была поставлена цель по созданию нового оборудования. Задачи, на которые оно было рассчитано, выглядели так:
- Упрощение отладки, замены.
- Относительная дешевизна.
- Гибкость, удобство модернизации.
- Снижение риска отказов.
Терминология, объясняющая, что такое ПЛК (PLC), внесена в международные и европейские стандарты качества МЭК, EN.
Что такое микроконтроллер
Микроконтроллер по сути является микросхемой, который состоит из:
- Центрального процессора. В него входят блок управления, регистры, ПЗУ (постоянное запоминающее устройство).
- Периферии, которая включает порты ввода-вывода, контроллеры прерываний, таймеры, генераторы различных импульсов, аналоговые преобразователи и подобные элементы.
Зачастую микроконтроллер называют микропроцессором. Но это не совсем так. Последний осуществляет только определенные математические и логические операции. А в состав микроконтроллера входит и микропроцессор с другими элементами, являясь лишь частью МК.
Что означает ошибка PCI Simple Communications Controller. Откуда скачать драйвер
Ошибки PCI Simple Communications Controller встречаются только на компьютерах, оснащенных чипсетом Intel, поскольку системы на AMD эту технологию не поддерживают (не надейтесь, что они не шпионят, просто используют собственный аналог Intel ME).
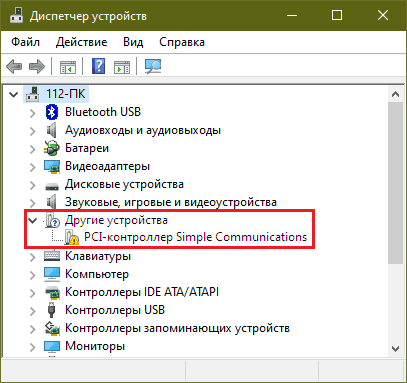
Выглядит ошибка примерно так, как показано на скриншоте выше – в Диспетчере устройств возле контроллера стоит желтый треугольник с восклицательным знаком. И, как вы наверняка догадались, для ее устранения достаточно переустановить драйвер, который можно скачать…
- … с сайта производителя вашего ноутбука или материнской платы ПК. Для некоторых моделей устройств отдельного драйвера Intel ME может не быть. Иногда разработчики включают его в состав пакета драйверов для чипсета.
- … .
Для поиска подходящей версии драйвера Management Engine в центре загрузки Intel необходимо знать поколение либо модель чипсета/процессора вашего ПК, а также версию операционной системы.

На фрагменте этой таблицы представлены драйверы, предназначенные для шестого, седьмого и восьмого поколения процессоров семейства Intel Core – отдельный дистрибутив для установки на Windows 8.1 и 10 и отдельный для Windows 7. Эти драйверы совместимы с любыми моделями материнских плат на чипсете Intel, если на них установлен один из упомянутых ЦП.
Узнать, какой модели процессор и чипсет (PCH) работают в вашем компьютере, помогут уже известные вам утилиты аппаратного мониторинга, такие как или . Скриншот ниже сделан в последней.

Еще один способ найти подходящий драйвер PCI Simple Communications Controller – определить код устройства методом, описанным в статье про контроллер шины SMBus, и воспользоваться помощью поисковой системы. Однако для Management Engine это не самый подходящий метод, потому что всё, что нужно, проще и безопаснее найти на сайте Intel.
Удачных решений!
Что такое контроллер?
Итак, велосипед оборудованный электрической тягой предполагает наличие на борту контроллера, который регулирует работу силового агрегата. Как мы все знаем, технический прогресс на месте не стоит и развитие индивидуального электротранспорта повлекло за собой разработку новой аппаратуры, не только более эффективно выполняющей свои функции, но и занимающей намного меньше пространства на e-bike. Контроллер не имеет подвижных деталей, а команды электродвигателю передаются посредством импульсов.
На блок управления возложены такие обязанности:
1. Трансформация постоянного напряжения электронакопителей в 3-х фазный ток для моторизированного колеса.
2. Регулировка мощности электродвигателя, в зависимости от степени воздействия на рукоять газа.
3. Защита электромотора.
4. Запуск силового агрегата.
5. Снижение уровня вибраций электродвижка при старте, что позволяет продлить срок его службы.
6. Включение и выключение электроники.
7. Управление скоростью и крутящим моментом.
8. Обеспечение контролируемой остановки средства передвижения.
9. Защита электрической системы аппарата от перенапряжения, перегрева и токовой перегрузки.
10. Отображение на панели управления рабочих параметров электросистемы.
11. Контроль напряжения аккумуляторной батареи и отключение электроники при критическом понижении напряжения — для защиты электронакопителя от глубокого разряда.
12. Дополнительно, на некоторых моделях электровелосипедов, осуществляется обратное преобразование энергии в момент торможения — так называемая рекуперация. Так вот, за неё также отвечает контроллер — он должен поддерживать режим рекуперации.
Внешний вид контроллера вы вряд ли спутаете с чем-то другим — это металлическая коробка с большим количеством выходящих из неё проводов. Они в свою очередь, стыкуются с органами управления расположенными на руле, аккумуляторной батареей, электрическим двигателем, датчиками Холла и бортовым компьютером.
Иногда девайс помещают в специальный бокс, защищая его таким образом от негативного воздействия окружающей среды и вдобавок, имеет место эстетическая сторона дела — так красивее будет. Однако здесь может быть один неприятный момент: если вы используете непроветриваемый чехол, то во время интенсивной работы контроллера, его перегрева просто не избежать. Такой «накал» может повлечь за собой оплавление проводов и контактов, а в самом худшем случае, гаджет полностью выйдет из строя.
В состав контроллера входят такие компоненты:
- управляющий микроконтроллер;
- понижающие преобразователи на 12 V и 5 V, для запитки микроконтроллера и периферии;
- силовые элементы — токоизмерительные шунты, конденсаторы, транзисторы.
Языки программирования PLC: LD, FBD, SFC, ST, IL, CFC
Контролер – это управляющее устройство. Действительно функциональным он становится только тогда, когда вы создаете и запускаете программу по его использованию.
Отсюда вытекает главная задача программируемого логического контролера – исполнение программы, которая осуществляет руководство технологического процесса.
Какой набор программ доступен для ПЛК? В принципе любой набор возможен. Главное, чтобы размер свободных ресурсов, данного инструмента, вам был не помехой. Разработчик получает широкие возможности по написанию программ.
Что же необходимо, чтобы осуществить программирование контроллера? Во – первых нужен программист, который бы досконально разбирался в данном вопросе. Во – вторых необходим сам компьютер и конечно пакет разработки.
Сердцем любой автоматической системы управления (АСУ) служит промышленный контроллер.
Историческая справка
Первый промышленный контроллер появился в 1969 году в США. Его создание инициировала автомобильная корпорация General Motors Company, а разработала компания Bedford Associates.
В те годы АСУ строились на жесткой логике (аппаратное программирование), что делало невозможным процесс их перенастройки.
Поэтому каждая технологическая линия требовала наличия индивидуальной АСУ. Затем в архитектуре АСУ стали использовать устройства, алгоритм которых можно было менять с помощью схем соединений реле.
Такие устройства получили название «промышленные логические контроллеры» (ПЛК). Однако АСУ, реализованные с использованием электромагнитных реле, отличались сложностью и большими размерами. Для размещения и технического обслуживания одной системы требовалось отдельное помещение.
Разработанный инженерами компании Bedford Associates (США) микропроцессорный ПЛК позволил использовать информационные технологии в процессах автоматизации производственных процессов, сведя при этом человеческий фактор к минимуму.
Принцип работы
С помощью контроллера для умного дома автоматизируются многие привычные процессы. Для этого можно оставить данные, которые были установлены по умолчанию, либо настроить систему конкретно под свои нужды. Так, следует запланировать выполнение различных действий в конкретные временные рамки, установив график работы приборов.
Централизованный и децентрализованный комплекс
Существует два вида системы управления:
-
Централизованная.
Умным домом управляет только один контроллер, обладающий подходящим функционалом. В пластиковый корпус встроен мини-компьютер с собственной ОС. В его комплектацию может входить GSM-модуль (для удалённого доступа) и сенсорный экран с кнопочным веб-интерфейсом. Есть все необходимые для подключения к сети разъёмы. -
Децентрализованная (региональная).
Используется более одного контроллера. Каждый из них отвечает ограниченному функционалу и контролирует работу похожих приборов или приборов, находящихся в определённой комнате. Встроенные электронные логические блоки не имеют собственной ОС. Исполняются простейшие сценарии действий.
Централизованная система, как правило, более функциональна, нежели региональная.
Варианты подключения
Подключить контроллер к сети умного дома можно следующими способами:
- Беспроводная локальная связь.
Такой тип связи может базироваться на радиосигнале, сети Wi-Fi или Bluetooth. Следовательно, радиус действия ограничен. Управление возможно из любой части дома и территории рядом с ним. Но возникнут проблемы, если дом имеет несколько этажей или обшит материалом, который портит качество сигнала. В этих случаях понадобится встраивать дополнительные радиоточки или приборы, которые улучшат качество сигнала. - Удалённая беспроводная связь.
Связь возможна только при соединении контроллера умного дома с глобальными сетями, системами расширения связи. Например, можно использовать GSM, GPRS и мобильный интернет. Так, данные о состоянии умного дома будут просматриваться с телефона, компьютера, ноутбука и планшета. - Проводная локальная связь.
Данный способ уже редко используют, несмотря на его достоинства. Он подходит для любого контроллера. Связь проходит с помощью кабеля или электрической проводки. Далее применяется сетевой коммутатор (устройство для соединения разных узлов компьютерной сети).Управление будет осуществляться с помощью компьютера или кнопок, расположенных на сенсорной/механической панели управления. - Проводная удаленная связь.
Такой способ является наиболее дорогим, потому что требует проложенных кабелей специально для умного дома. Связь проходит при помощи специальных программ, установленных на компьютер. Это удобно только для государственных учреждений и промышленных предприятий. Для дома проводная удалённая связь применяется очень редко.
Что нужно для программирования микроконтроллера
Путь программирования проходит несколько этапов:
- Перед тем как приступить к написанию кода программы, надо определиться с конечной целью.
- Составляется алгоритм работы программы.
- Непосредственное написание кода программы. Коды пишутся на языке Си или Ассемблере.
- Компиляция программы, т. е. перевод ее в двоичную или шестнадцатеричную систему 1 и 0. Только так ее сможет понять МК.
- Откомпилированный код записывают в память контроллера.
- Прошивают МК с помощью программатора. Они бывают двух типов подключения: через COM или USB порт. Самый простой и дешевый программатор USBASP.
- Тестирование и отладка МК на реальном устройстве.
Радиолюбители иногда обходятся без прописывания алгоритма работы программы на бумаги. Они держат его в голове.
Подбор контроллера заряда по необходимым функциям
В современном мире в стремлении увеличения эффективности, автономности и оперативности информационного контроля к контроллерам заряда от солнечных батарей также применяются требования к обеспечению различными функциями, в зависимости от места применения контроллера.
Наиболее востребованными функциями необходимыми в контроллере заряда являются:
-
Автоопределение номинального напряжения солнечных батарей и акб 12В/24В/36В/48В и др.
-
Наличие дисплея для отображения показаний и удобства настройки;
-
Возможность вручную устанавливать параметры работы контроллера;
-
Наличие коммуникационных портов для подключения внешнего дисплея или компьютера, с учетом удаленного доступа. Такие порты, как RS232, USB, Ethernet интерфейсы для связи с другими устройствами;
-
Поддержка различных типов аккумуляторов;
-
Встроенные защиты: перегрузка, перезаряд, короткое замыкание;
-
Комплексная самодиагностика и электронная защита может предотвратить ущерб от неправильной установки или системных ошибок;
-
Внешние датчики температуры, тока и др.;
-
Реле управления другими устройствами;
-
Встроенные таймеры на отключения нагрузки;
-
Электронный журнал параметров работы контроллера.
Солнечный контроллер заряда необходимо выбирать с учетом требуемых функций.
6. Выбор контроллера по типу регулировки напряжения и тока. ШИМ и MPPT.
По регулировке тока и напряжения современные контроллеры можно разделить на два основных типа ШИМ и MPPT.
1) ШИМ контроллеры.
2) MPPT контроллеры.
Подробное описание технологии лучше всего смотреть в статьях ШИМ контроллеры, MPPT контроллеры, в чем отличие ШИМ и MPPT контроллера.
Основные типы
Назначение контроллера машиниста остается неизменным при любой конструкции. На сегодняшний день различают два основных вида — барабанный, кулачковый.
Что касается конструкции барабанных контроллеров, то в данном случае замыкание и размыкание проводов цепи управления будет осуществляться при помощи специальных сегментов, расположенных на барабане. К данному сегменту прикреплены так называемые пальцы, которые, в свою очередь, соединены с соответствующими проводами управления электрической цепью. Сами пальцы крепятся к стойке.
Если говорить о кулачковых контроллерах, то в данном случае вместо барабана для замыкания управляющих проводов цепи используются кулачковые контакторы или же контакторные элементы. Данные элементы крепятся на специальной стойке, а воздействуют на них кулачковые шайбы.

Процессоры
Сегодня разработчику систем управления доступно множество вариантов выбора процессоров — от маломощных (с точки зрения вычислительных способностей) и до многоядерных, причем зачастую с перекрывающимися характеристиками в части производительности. Поэтому в таком вопросе рекомендуется сотрудничать со службой технической поддержки и инженерами по продажам. Благодаря их знаниям о продуктах можно выбрать подходящий процессор для конкретного приложения с оптимальным соотношением цена/производительность.
В идеале при выборе процессора необходимо учитывать масштабируемость, поэтому ПО управления по всей линейке продуктов контроллера должно быть совместимым. Поставщики различных технологий автоматизации инвестируют значительные средства в создание складских запасов важнейших компонентов с целью гарантировать доступность продукта в течение достаточно длительного времени, а также в модернизацию — для замены устройств, в том числе процессоров, снимаемых с производства.
Кроме того, имеется еще один немаловажный момент. Нужно определить заранее, потребуется ли вам принудительная вентиляция или благодаря ожидаемой температуре окружающей среды, в которой будет установлен контроллер, можно будет использовать более экономичные и удобные безвентиляторные системы. Возможные варианты отвода генерируемого контроллерами тепла включают вентиляторы, кондиционеры, радиаторы и водяное охлаждение.
Виды контроллеров
Мы уже упомянули, что контроллеры бывают различными, но они выполняют подобные задачи – переключение цветов и регулировку интенсивности их свечения. Они отличаются:
- По типу исполнения (защищенные от условий окружающей среды и незащищенные);
- По типу монтажа (с отверстиями под монтаж на саморезы, или на Din-рейку и прочие).
- По способу управления (пульт дистанционного управления, кнопки на корпусе контроллера или другие wireless-радио технологии, например, управление со смартфона по WiFi).
Контроллеры для монтажа на DIN-рейку удобно встраивать в электрощиты. Пульты управления также различаются, на устройства которые используют ИК-порт для передачи сигнала и радиопередачу. При этом на пульте присутствует возможность выбора автоматического режима или ручной установки цвета и яркости. При подборе устройства будьте внимательны, ведь в различных экземплярах имеются свои особенности управления и подключения. А необходимой функции может просто не оказаться.
Вообще, видов пультов очень много. Самый дешевый вариант – это кнопочное устройство, у которого в качестве передатчика инфракрасный светодиод. Оно обладает недостатками присущими всем подобным изделиям. Например, система будет реагировать, только если направлять в сторону приемника контроллера пульт при выборе и регулировке режима работы. Более современные модели в комплекте содержат уже сенсорные устройства управления.
Интересная модель:
Ecola RF mini controller 6 А, работает от 12 – 24V, при питании 12 V позволяет зажечь 72 W, а при 24 V – уже 144 W светодиодного света. Использует кнопочный радио (RF) пульт для настройки. Имеет очень маленький разъем для подсоединения к вашей схеме. Изменяет цвет подсветки и работает как диммер.
В чем отличие микроконтроллера от микропроцессора?
Весь компьютерный функционал микропроцессора (Micro Processor Unit — MPU) содержится на одном полупроводниковом кристалле. По характеристикам он соответствует центральному процессору компьютера ЦП (Central Processing Unit — CPU). Область его применения – хранение данных, выполнение арифметико-логических операций, управление системами.
МП получает данные с входных периферийных устройств, обрабатывает их и передает выходным периферийным устройствам.
Микроконтроллер совмещает в себе микропроцессор и необходимые опорные устройства, объединенные в одном чипе. Если нужно создать устройство, коммуницирующее с внешней памятью или блоком ЦАП/АЦП, то понадобится только подключить источник питания с постоянным напряжением, цепь сброса и источник тактовой частоты.
Порт UART в полетном контроллере
Аббревиатура UART с английского расшифровывается как (Universal Asynchronous Receiver/Transmitter) — универсальный асинхронный приемник/передатчик.
К порту UART подключаются различные периферийные устройства, такие как, приемник, различная телеметрия и так далее. У порта есть два контакта для обмена данными — прием и передача.
На фото ниже вы можете увидеть пример UART порта и их настройки в Betaflight, точнее, вы можете назначить в этой вкладке порту любое устройство, которое поддерживает обмен данными:

Сколько бывает портов UART на полетном контроллере?
UART портов много не бывает — чем больше, тем более гибко можно будет настраивать ваш квадрокоптер, а также они будут дублировать друг друг в случае поломки.
Но само количество портов зависит от размеров платы полетного контроллера и от того, как расположены на ней компоненты, а также от типа процессора, который использует ПК. 3-е и 4-е поколение полетных контроллеров (F3-F4) имеют от 3 до 5 UART, а 7-е поколение — 7 и более. Оно и понятно, слабый процессор не сможет физически обрабатывать столько периферии.
| F1 | F3 | F4 | F7 |
| 2 UART | 3-5 UART | 3-6 UART | 7+ UART |
Инвентированный сигнал и UART
Инвентированный сигнал поддерживают полетные контроллеры 3-го и 7-го поколения, а вот 1-е и 4-е поколения не могут.
Передатчики FrSky с протоколом работы SBUS и SmartPort на выходе инвертируют свой сигнал, и их могут обработать только процессоры нового поколения, такие установлены на 7-м и 3-м поколении (F3 и F7), так как у них уже есть встроенный инвертор.
А вот для устаревших поколений (F1 и F4) нужно перед портом UART устанавливать инвертор, который будет обрабатывать и преобразовывать сигнал и передавать его уже в UART. Хотя в некоторых полетных контроллерах F4 производители сразу устанавливают инверторы для SBUS и SmartPort, пилоту можно сразу подключать приемник к ПК.
Если у вас закончились UART порты, то можно воспользоваться функцией в Betaflight «soft-serial», благодаря которой можно создавать виртуальные UART. С помощью ПО Betaflight создается эмуляция этого порта, как будто он есть физически, но на самом деле его нет. Также стоит отметить, что такой порт будет работать значительно медленнее, чем физический и он не подойдет для подключения приемника, например, так как такое замедление критично. Процессор тоже будет работать с повышенной нагрузкой.
Конструкция и принцип действия
Конструктивно ПЛК состоит из управляющего блока, модулей входов/выходов и модулей связи. Важнейшее место в составе любого ПЛК занимает процессорный модуль. К нему присоединяются модули расширения, источники питания, линии связи с дополнительным оборудованием. Кроме названных устройств, в состав контроллера могут входить и некоторые дополнительные устройства.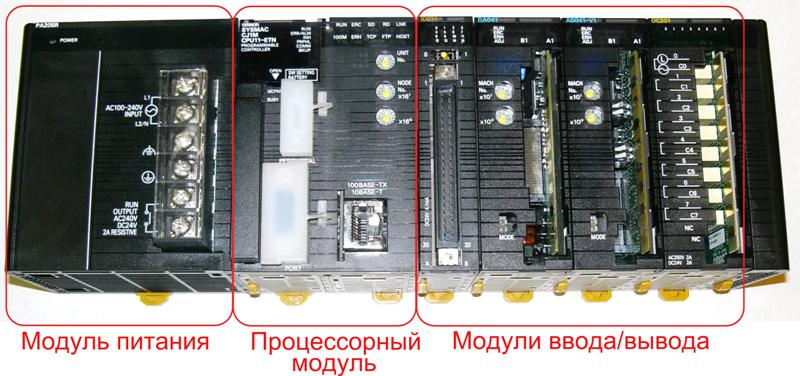
В соответствии с заданной программой логический микроконтроллер обрабатывает данные, поступающие с модулей входов, и отправляет управляющие команды на исполнительные механизмы, которые соединяются с ПЛК посредством модулей связи. ПЛК являются устройствами реального времени. 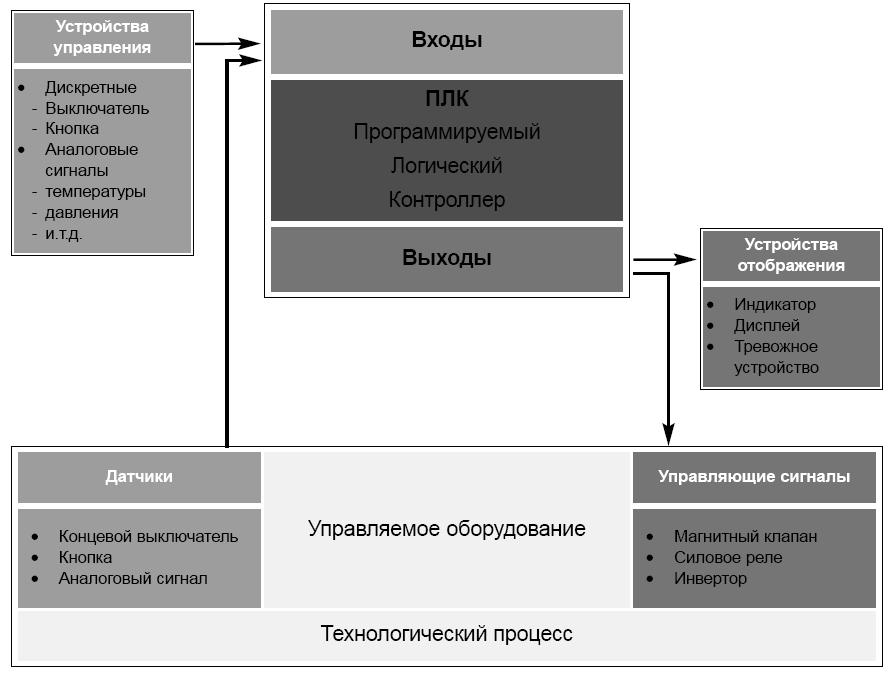
Понятное описание принципа действия контроллера представлено на следующем англоязычном видео:
ПЛК имеют ряд особенностей, отличающих их от прочих электронных приборов, применяемых в промышленности:
• микроконтроллера (однокристального компьютера), микросхемы предназначенной для управления электронными устройствами, областью применения ПЛК обычно являются автоматизированные процессы промышленного производства, в контексте производственного предприятия;
• компьютеров, ПЛК имеют развитые устройства ввода-вывода сигналов датчиков и исполнительных механизмов в противовес слабым возможностям ввода-вывода управления (клавиатура, мышь, монитор и т. п.);
• встраиваемых систем — ПЛК устанавливается отдельно от управляемого при его помощи оборудования.
В данном видео демонстируется управление станком резки металла посредством ПЛК:
Принцип работы ПЛК
ПЛК предназначены для автоматического управления дискретными и непрерывными технологическими процессами.
Основные принципы работы ПЛК:
- Цикличность
- Работа в реальном масштабе времени, обработка прерываний
Цикличность работы ПЛК
В одном цикле ПЛК последовательно выполняет следующие задачи:
- Самодиагностика
- Опрос датчиков, сбор данных о текущем состоянии технологического процесса
- Обмен данными с другими ПЛК, промышленными компьютерами и системами человеко-машинного интерфейса (HMI)
- Обработка полученных данных по заданной программе
- Формирование сигналов управления исполнительными устройствами
Время цикла
Время выполнения одного цикла программы зависит от:
- размера программы
- количества удалённых входов-выходов
- скорости обмена данными с распределённой периферией
- быстродействия ЦПУ
Время цикла (время квантования) должно быть настолько маленьким, чтобы ПЛК успевал за скоростью изменения переменных процесса (см. теорию автоматического управления),
в противном случае процесс станет неуправляемым.
Watchdog
Строжевой таймер следит за тем, чтобы время цикла не превышало заданное.
Обработка прерываний
По прерываниям ПЛК запускает специальные программы обработки прерываний.
Типы прерываний:
- Циклические прерывания по времени (например, каждые 5 секунд)
- Прерывание по дискретному входу (например, по сработке концевика)
- Прерывания по программным и коммуникационным ошибкам, превышению времени цикла, неисправностям модулей, обрывам контуров
Модули ПЛК
- Корзина для установки модулей
- Стабилизированный блок питания AC/DC (~220В/=24В)
- Центральное процессорное устройство (ЦПУ) с интерфейсом для подключения программатора,
переключателем режимов работы, индикацией статуса, оперативной (рабочей) памятью, постоянной памятью для хранения программ и блоков данных - Интерфейсные модули для подключения корзин расширения локального ввода-вывода и распределённой периферии
- Коммуникационные модули для обмена данными с другими контроллерами и промышленными компьютерами
- Модули ввода-вывода
- Прикладные модули (синхронизация, позиционирование, взвешивание и т.п.)
Функции устройств ввода
- Электрическое подключение и питание технологических датчиков (дискретных и аналоговых)
- Диагностика состояния (обрыв провода, контроль граничных значений, короткое замыкание и т.п.)
- Формирование цифровых значений (машинных слов) технологических параметров
- Передача этих данных в память ПЛК для дальнейшей обработки
Функции устройств вывода
- Электрическое подключение исполнительных устройств
- Диагностика состояния (обрыв провода, контроль граничных значений, короткое замыкание и т.п.)
- Приём управляющих машинных слов из памяти ПЛК
- Формирование управляющих сигналов (дискретных и аналоговых)
Типы устройств ввода-вывода
- Модули локального ввода-вывода располагаются:
- в одной корзине с ЦПУ
- в соседних корзинах в одном шкафу с ЦПУ
- в корзинах в соседних шкафах в одном помещении с ЦПУ
- Модули распределённого ввода-вывода (децентрализованная периферия) располагаются удалённо (в другом здании или в поле по по месту управления)
и связываются с ЦПУ по промышленной полевой шине. Станции удалённого ввода-вывода могут иметь взрывозащищённое исполнение или повышенный
класс защиты корпуса (например, IP67) и устанавливаться без шкафа
Функции коммуникационных модулей
Коммуникационные модули предназначены для обмена данными:
- с удалёнными модулями ввода-вывода (Profibus, Modbus и др.)
- с программаторами, панелями оператора (HMI) и другими контроллерами
- с полевыми устройствами (HART, Foundation Fieldbus и др.)
- с сервоприводами (SERCOS)
- с промышленными компьютерами верхнего уровня (Industrial Ethernet и др.)
- по радиоканалам (GSM, GPRS)
- по телефонным линиям
- по Internet (встроенные web-серверы публикуют на своих страницах статусную информацию)
Заключение. Как работает SSD – контроллер наше все, ну почти…
Как видим, приватная жизнь SSD накопителей весьма насыщенная, и «за кулисами» происходит весьма активная работа. Я не упомянул еще такие моменты, как внутреннюю систему коррекции ошибок (ECC), систему контроля за питающим напряжением и еще что-то. Часть этого вполне заслуживает отдельного разговора, и, возможно, к этому мы еще вернемся.
При использовании SSD приходится менять некоторые привычки. Возможно, они уже успели выработаться после использования классических жестких дисков. Например, многие знают, что случайно удаленный файл, даже если его нет в «корзине» ОС Windows – это еще совсем не приговор. Если о том, что данный файл был крайне нужен, вспомнили не спустя дни/недели/месяцы, а сразу же, то с очень большой долей вероятности его можно восстановить.
В случае с SSD это не так. Одно неловкое движение, сработавший «сборщик мусора» (а о том, когда он срабатывает мы, в общем то, и не знаем) и прочие характерные для твердотельных накопителей технологии – и случайно удаленная информация пропадает безвозвратно. То, что осознание своей ошибки пришло сразу же, жизнь облегчает мало.
Да, и желательно не забивать SSD «под завязку». Вот обычные HDD вполне лояльно относятся к тому, что они используются вплоть до последнего килобайта. При условии, конечно, что это не системный диск.
Итак, сегодняшняя цель была – познакомиться более внимательно с устройством твердотельного накопителя. Пытались разобраться, как работает SSD, рассмотреть «механику» функционирования этого лишенного каких-либо движущихся механических частей устройства для хранения данных.
Надеюсь, ничего не перепутал, а если все же где-то ошибся — распутаемся вместе.
Заключение
Как вы заметили, полетный контроллер — это очень важный узел в квадрокоптере и занимает очень много места в теории. И на вопрос, как правильно выбрать полетный контроллер, у вас не должно оставаться этих самых вопросов, а если остались, вы должны понять, для чего вам нужен квадрокоптер, для каких нужд. Если для гонок и драйва, то одни контроллеры, если для съемки, то другие. Также стоит учитывать ваши навыки, если вы новичок, то не стоит брать дорогие контроллеры с кучей датчиков или наоборот те, в которых абсолютно ничего не настроено и даже нет прошивки.
Также стоит учитывать бюджет, который вы можете потратить, так как цены очень сильно разнятся. Например, SP Racing F7 с OSD для гоночных дронов стоит от 1600 до 2500 рублей, а вот DJI A3 для профессиональной фото- и видеосъемки стоит 50 000 – 60 000 тысяч рублей.
Подведем итоги:
Выбирать полетный контроллер следует из ваших потребностей – для гонок, для съемки или для автономных полетов, а также, а также, на основе статьи, что написана выше.